MES system based on microservice architecture
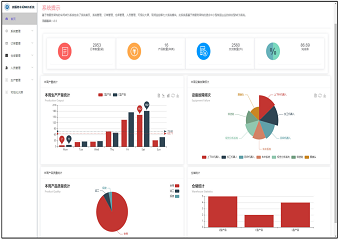
MES system based on microservice architecture: The system takes an automatic bar processing workshop as the basic object, and adopts the development method of separating the front and back end for system development. The front end relies on technology stacks such as Vue.js, Elementui, Echarts to realize the front-end data interaction and page design, and the back end relies on components such as Spring Cloud Alibaba, Spring Cloud Gateway, Nacos, RPC open source framework, Sentinel to realize the construction of micro-service framework. Moreover, it relies on Spring, Spring Boot, Mybatis, YOLOv3 target detection algorithm to complete the realization of basic functions. Finally, the real-time perception of hardware device data is realized by dynamic link library, Redis cache database and WebSocket communication protocol. Each layer of services is isolated from each other, and the microservices in the layer also follow the design principle of high cohesion and low coupling to minimize the coupling degree of the system, improve its scalability and versatility, and make the system have better reliability, faster response time and appropriate throughput.
 Your current location:
home
>
Exhibition Hall Online
>
Venue Layout
>
N2
>
Chongqing Construction Technology Development center
>
Chongqing Jiangke Robot Co., L...
Your current location:
home
>
Exhibition Hall Online
>
Venue Layout
>
N2
>
Chongqing Construction Technology Development center
>
Chongqing Jiangke Robot Co., L...