首页
大会简介
新闻资讯
大会要闻
行业资讯
展会新闻
通知公告
精彩视频
智博五年
开幕式
简介
嘉宾报名
展示
展览介绍
展商展示
展商报名
招展手册
社会观众报名
展商手册
观展手册
展位图
系列活动
生态大会
专业赛事
产业交流活动
产业对接活动
发布
关于我们
重庆市情
酒店推荐
旅游景点
下载中心
联系我们
往届回顾
中文
中文
EN
您当前的位置:
首页
>
展示
>
线上展厅
>
场馆布局
>
N1
>
科技部
>
上海交通大学
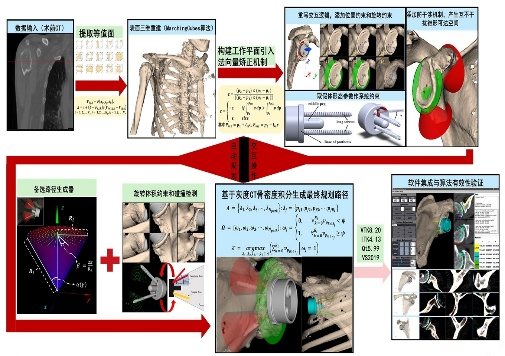
AI肩关节置换术手术规划系统
针对反向肩关节置换术的手术规划时间长、效率低、假体固定螺钉路径不可靠、对医生临床经验要求高等难题,本团队提出了一种基于骨密度评估和锥形空间路径积分的假体固定螺钉路径的自动规划算法,并研发了相关的自动手术规划软件。通过实验显示所提出的算法及软件能够高效、精确地实现反向肩关节置换术的自动术前计划,在未来具有广阔的临床应用前景。
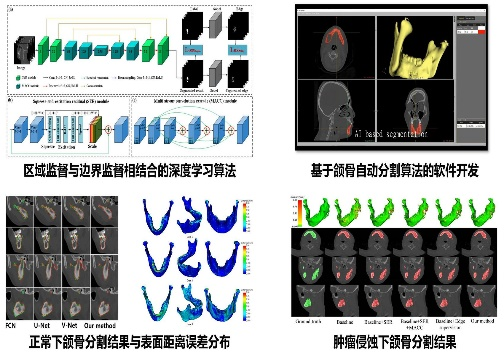
AI医学图像处理及下颌骨重建手术规划系统
针对下颌骨重建手术中肿瘤侵蚀下颌骨存在伪影干扰、区域相连、形态各异、类别不平衡等因素而导致难以精确分割的难题,本团队提出了一种基于 DenASPP 和 Attention gates 的常规下颌骨自动分割算法和一种多卷积模块组合和边界监督的肿瘤侵蚀下颌骨自动 3D 分割网络。这些算法实现对下颌骨重建手术中肿瘤侵蚀和非肿瘤侵蚀下颌骨的精确自动分割。同时,开发了集成上述算法的下颌骨重建手术智能规划软件,并进行了相关的实验,有效提升了下颌骨重建手术的规划效率和精度,在未来具有广阔的临床应用前景。
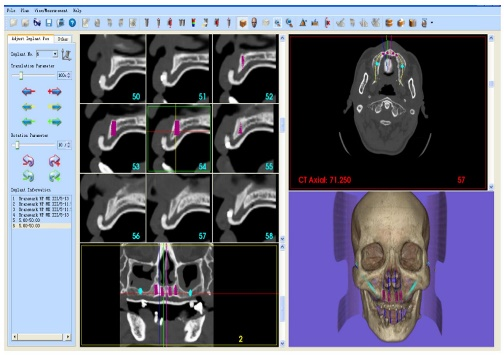
AI口腔种植手术规划系统
针对口腔种植手术规划中存在复杂型腔钻孔的防(神经)损伤定位与咬合定向兼容的难题,本团队提出了基于多平面重建及曲面重建的路径规划等关键技术,研发了计算机辅助口腔种植的手术规划系统,解决了复杂手术环境下空间路径规划困难的难题,有效地降低了手术规划难度,提升了手术规划的效率,并在口腔种植手术中获得了有效应用及推广。
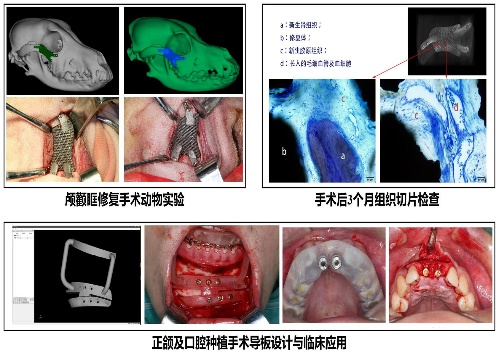
AI医用植入物及导板设计系统
针对临床复杂空间环境下手术导报及植入物设计困难、流程复杂繁琐、智能化程度低、对临床经验要求高等难题,本团队提出了基于人工智能的个性化植入物自动设计、植入物孔细化设计、智能导板设计等相关算法,并开发了集成上述关键算法的智能软件系统,实现了高效可靠的植入物自动设计。相关算法及软件在颅颌面外科等复杂手术中进行了临床应用及推广。其中,智能植入物设计在颅颧眶修复手术的动物实验中进行了应用,并取得了良好的效果,智能导板设计在正颌及口腔种植手术中获得了有效应用及推广。
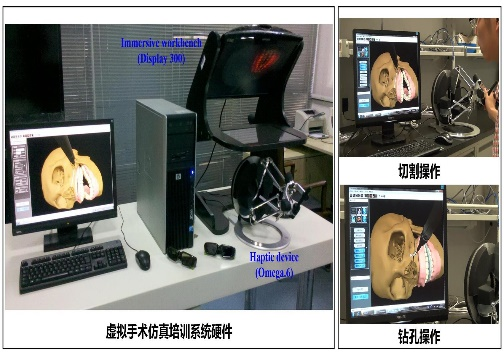
基于虚拟现实的手术仿真系统
针对高难度、高风险口腔颌面外科手术仿真系统存在逼真性差、交互足、力反馈精度不足等难题,本团队通过力反馈与沉浸式虚拟现实立体视觉平台,提出了钻孔、切割、磨削、流血等相关的实时仿真算法和精确碰撞检测算法,建立了逼真的视、听、触觉一体化的口腔颌面虚拟环境。能够对术前方案进行模拟仿真与预演,使医生身临其境地感受和体验,加深直观理解和认识,从而可预见难以预料的手术困难与复杂性,得到最为理想的手术方案或路径,有利于口腔颌面外科向个性化、安全化、精确化与微创化方向发展。
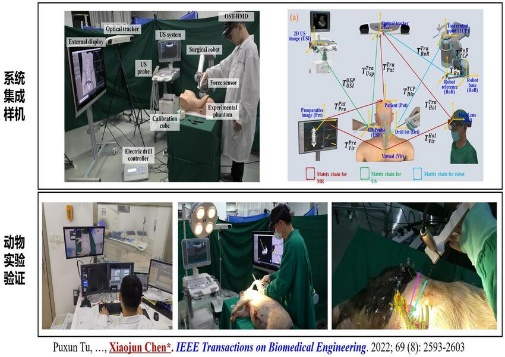
基于混合现实的头颈颅颌面外科手术机器人系统
针对术中软组织形变导致术前规划在术中失效及医生术中手眼不协调的临床难题,本团队提出了一种超声图像引导的术中软组织形变跟踪方法。利用轻量化卷积神经网络实现了术中超声图像的实时分割,利用光学导航设备建立术前重建的软组织模型与术中软组织形态之间的对应关系,并通过计算后验形状概率更新形变场,最终实现了术中软组织形变的实时动态跟踪。此外,将软组织形变算法集成至前期研发的头颈颅颌面外科混合现实手术机器人系统,通过模型和动物实验,对系统的精度,实时性进行了实验测试,结果表明:软组织形变跟踪的表面平均距离误差为1.04±0.27 mm,导航距离误差为1.52±0.43mm,具有较大的临床应用潜力。
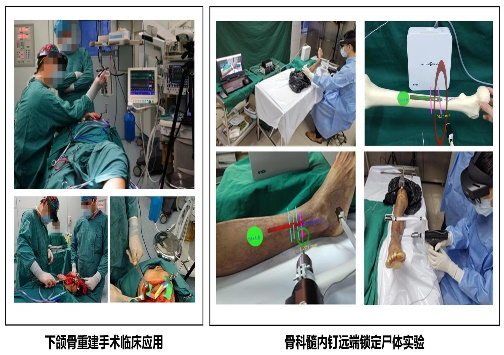
基于增强现实的手术导航系统
本团队在电磁手术导航方向进行了深入研究,创新地提出了电磁传感手术工具尖点标定方法,患者图像配准方法,电磁干扰误差补偿算法等。在头颈外科中,研发了下颌骨重建手术增强现实导航系统,有效解决了医生操作不直观、经验要求高的难题,在模型和动物实验中对系统的精度进行了测试,结果表明系统的距离和角度误差分别为1.23±0.17 mm和1.83±0.27°。在骨科中,研发了髓内钉远端锁定电磁导航系统和增强现实手术导航系统,并通过模型 和尸体实验对系统性能进行了测试,结果表明该系统有效缩短了手术时长和医生学习曲率,具有重要的临床推广价值。
AI手术导航系统及数字化手术室
本团队在提出了创新的医学图像分割与配准、 高精度实时跟踪、无创空间配准、基于无标志点的表面配准、基于图像识别的空间搜索、手术器械标定、精度检测等关键算法,解决了手术导航的若干关键技术。同时,研发了国内首台“颅颌面外科手术导航系统” ,已成功完成百余例临床实验, 获国家医疗器械注册证(Ⅲ类)与欧盟 CE 认证, 正由某企业在国内外市场推广。所研制的手术导航系统成果获得了国家科技进步二等奖、上海市科技进步奖二等奖、浙江省科技进步奖等奖励。
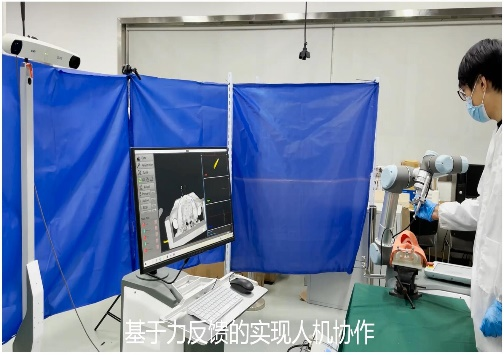
智能手术机器人系统
本作品针对外科手术操作难度大、风险高等难题,结合上述所提出的智能手术规划及导航等关键技术,提出了基于力感知信息引导的人机交互技术,利用术中虚拟软组织形态,计算手术机器人禁止区域与术前规划路径的干涉关系,实时评估手术安全性。最终开发了智能手术机器人系统,有效地提升了手术的精准化、微创化和安全化,并在颅颌面、骨科、肺科等复杂临床手术中得以应用及推广。
 您当前的位置:
您当前的位置:

 渝公网安备 50011202502061号
渝公网安备 50011202502061号
