 您当前的位置:
您当前的位置:
步态训练和评估系统(康复机器人)Flexbot®
发布方:重庆市英诺威医疗科技有限公司
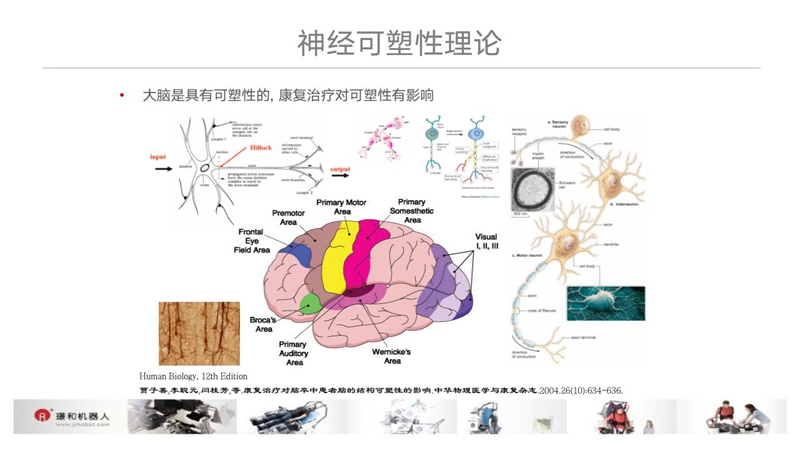
下肢运动功能障碍是脑卒中、颅脑损伤、脊髓损伤等患者常见的后遗症之一,患者往往无法恢复和准确掌握步行运动技能。以神经可塑性原理为基础的机器人步态训练,能够最优化患者大脑运动功能的重塑,达到“积畦步,以至千里”的效果,最终帮助患者重新掌握步行运动技能。
Flexbot多体位智能下肢康复机器人训练系统是科技进步的结晶,包含了尖端的传感器、精密机械、电子、自动化控制、虚拟情景互动软件等技术。为患者提供量化的、多体位的、多种运动模式的步态训练,同时实时提供数据信息反馈。Flexbot机器人从早期介入,辅助步行训练,开创了机器人疗法的新模式。
一、强化的步态功能训练系统:提供高强度、可重复的自然步态功能训练
Flexbot机器人步态训练系统,采用仿生设计的柔性外骨骼,提供符合人体生理特性的步态训练模式,通过競膝踝的协调控制,模拟正常人行走的整个步态周期过程,从早期介入康复训练,加速患者步行功能康复进程。
6套力传感器+2套足底压力传感器:六个独立驱动模块,可分别实现双侧髓膝踝关节独立活动,驱动模块提供的引导力可以根据患者训练中的反馈自动调节。
可控制运动方式:标准步态训练、自行车运动、踏步运动、单关节独立运动、自定义运动轨迹、等速训练,CPM训练。
治疗师可以方便地调整训练参数,制定个性化的训练方案,以适应不同患者的个体需求,达到最佳的训练效果。
二、全新的减重支持系统:完美实现早期、中期、后期、骨盆自由摆动的全程式步态训练
早期卧床步态训练:待生命体征平稳后,采用卧床位完全减重支持,进行标准化步态固化训练和有氧训练,从早期介入,实现正常步态的模式建立和对病人运动感觉的输入刺激
中期斜床步态训练:动态的减重支持系统,可以适应患者的康复进程,通过循序渐进地减重比例,进行多体位的步态训练,完善步行中枢的功能重组
后期直立步态训练:循序渐进的康复进程,由部分减重逐渐过渡到全负重步行训练,增加足底负荷刺激
动态伺服电机控制减重系统能使身体重心在行走时上下浮动。
三、虚拟步行情景互动系统:实时生物反馈,改善患者心理状态,优化康复效果
患者置身于丰富多彩的虚拟步行训练场景中进行步态训练,患者通过步行动作控制虚拟人物,并且提供实时的生物反馈,提高了训练的积极性和主动参与的程度。
Ÿ 丰富的虚拟步行场景,解决实际步行问题
Ÿ 可感知的趣味训练提高患者的积极性
Ÿ 美妙的音乐,营造轻松生动的训练氛围
Ÿ 音乐疗法,有助改善患者心理功能
Ÿ 人机接口技术,实现实时的生物反馈
Ÿ 人机交流,激励患者,指导正常步态训练
Ÿ 机器人具有智能感知能力,患者控制虚拟人物,增强患者自主运动控制的意识
四、康复训练评估与分析工具:康复评估与训练数据的可视化与信息化
康复训练评估工具:在静止状态下,患者腿部关节主动用力的百分比测量
Ÿ 训练前评估,指导制定训练方案
Ÿ 控制康复进程
Ÿ 确保训练安全
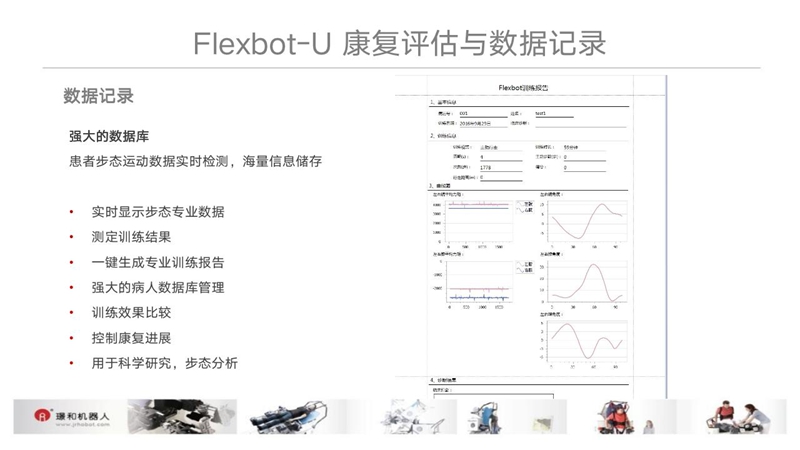
康复训练分析工具:患者步态运动数据实时检测,海量信息储存
Ÿ 实时显示步态专业瓣
Ÿ 测定训练结果
Ÿ —键政专业训练报告
Ÿ 强大的病人数据库管理
Ÿ 训练效果比较
五、步态驱动器、减重系统和跑台可以自动同步:动态伺服电机控制减重系统能使身体重心在行走时上下浮动
保证髄、膝和踝关节的联合运动,足底着地、滚动和离地与腿部运动周期、重心起伏和跑台速度同步,实现人体真实的生理步态。
配有方便患者方便转移的转移板等装置,跑台与步态驱动器同步,连续可调,配合步态训练时速度0-10km/h。

















 渝公网安备 50011202502061号
渝公网安备 50011202502061号