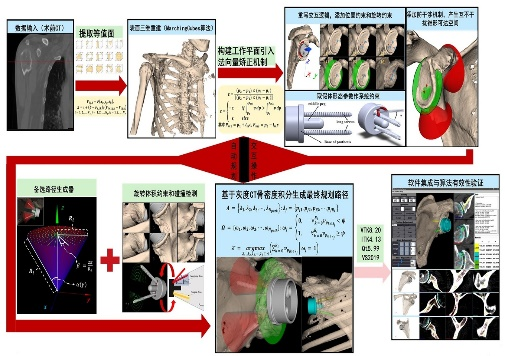
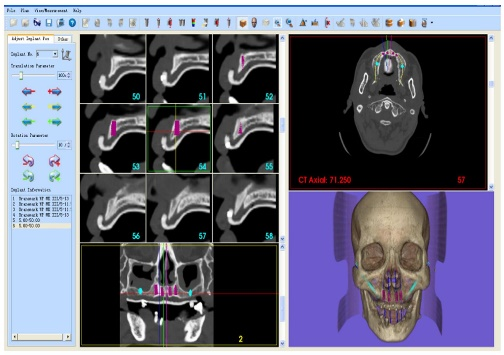
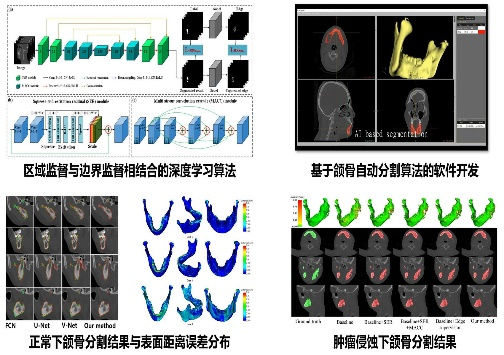
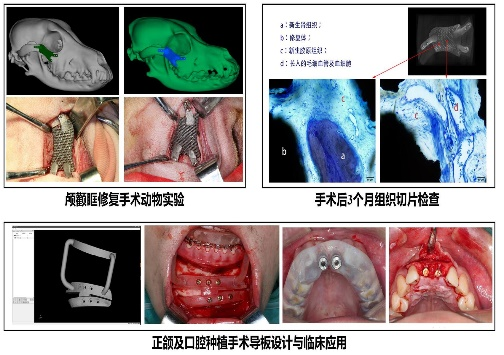
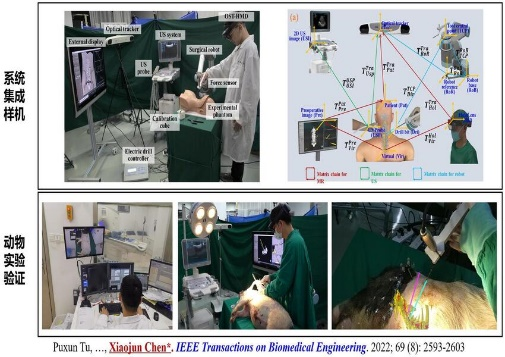
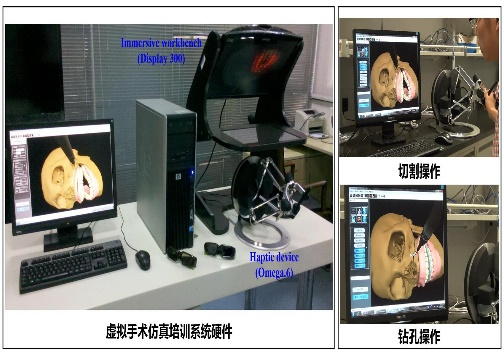
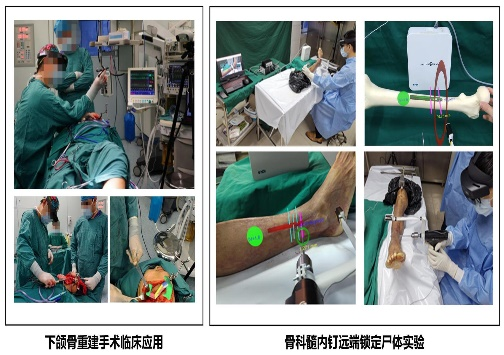
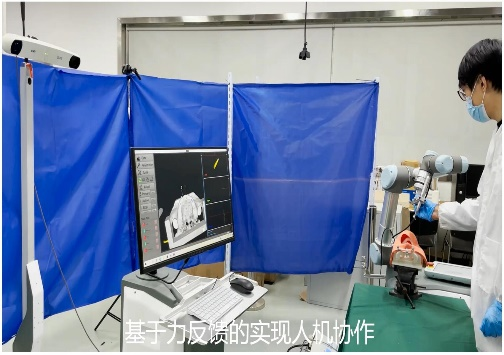
AI Surgical Navigation System and Digital Operating Room
Our team has proposed innovative key algorithms for medical image segmentation and alignment, high-precision real-time tracking, non-invasive spatial alignment, surface alignment based on unmarked points, spatial search based on image recognition, calibration of surgical instruments, and accuracy detection, which have solved a bunch of key technologies for surgical navigation. At the same time, the team has developed the first “Craniomaxillofacial Surgery Navigation System” in China, which has successfully completed more than 100 cases of clinical trials, won the National Medical Device Registration Certificate (Class III) and the European Union CE certification, and is being promoted in the domestic and international markets by an enterprise. The surgical navigation system developed by the team has won the Second Prize of National Prize for Progress in Science and Technology, the Second Prize of Shanghai Award for Scientific and Technological Advancement, and the Award for Scientific and technological Advancement of Zhejiang Province.
 Your current location:
home
>
Exhibition Hall Online
>
Venue Layout
>
N1
>
Ministy of Science and Technology
>
Shanghai Jiao Tong University
Your current location:
home
>
Exhibition Hall Online
>
Venue Layout
>
N1
>
Ministy of Science and Technology
>
Shanghai Jiao Tong University